![]()
SPIRIT aims to develop an inspection skill for robots that takes the step from programming of complex inspection tasks to configuring such tasks.
GENERAL INFORMATION
- It belongs to the Horizon2020 European project
- 3 years, start date February 2018
- ICT Call ICT-25-2016-2017
DETAILS
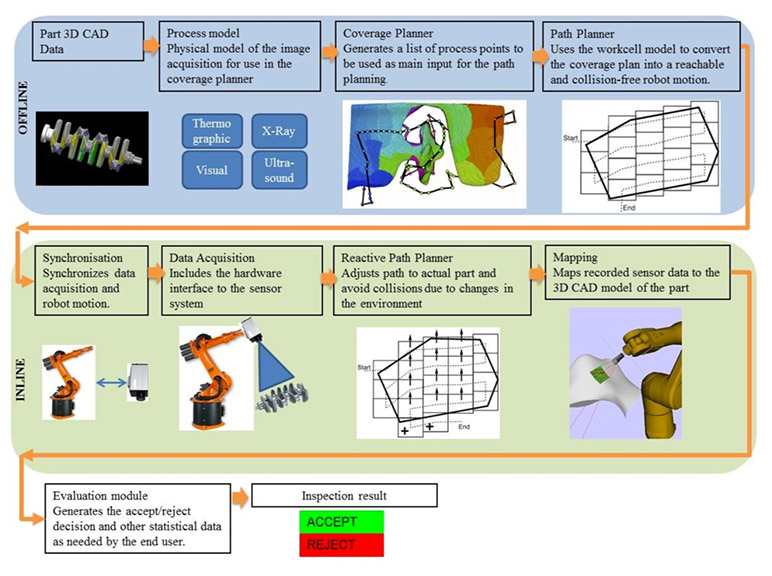
The development of an intelligent inspection skill for robots will substantially reduce the engineering costs when setting up the inspection task in industrial environments. The main project result will be a software framework that consists of two modules: online and offline.
The offline framework will handle the model-based automatic coverage planning for complex parts, different image-based inspection processes and the automatic robot program generation. It will include a generic interface to allow the easy exchange of process models (for different inspection technologies), of the CAD model of the part (for a different type of product to be inspected) or of the work-cell model (for a different kinematic structure).
The generic “online framework” deals with sensor data mapping to transfer 2D image data to the 3D object model. It will provide the backbone for the real-time execution of the actual inspection process, including the synchronization of data acquisition and robot motion.
OUR CONTRIBUTION TO THE PROJECT
- Path planning
- Offline coverage planning
- Global re-planning
Download the presentation of the project ![]()
